
TalTech Iseauto valmib TalTech infotehnoloogia-ja inseneriteaduskonna tudengite ning Silberauto AS koostööna. Projekti ühe partnerina on kaasatud ka ABB.
Kui eelnevas kolmes osas keskendusime TalTech Iseauto arendamisele, siis nüüd on aeg heita pilk sellele, milline Iseauto lõplik versioon hetkel välja näeb, mis sensorid on bussi küljes ning milleks Iseauto ikkagi võimeline on.
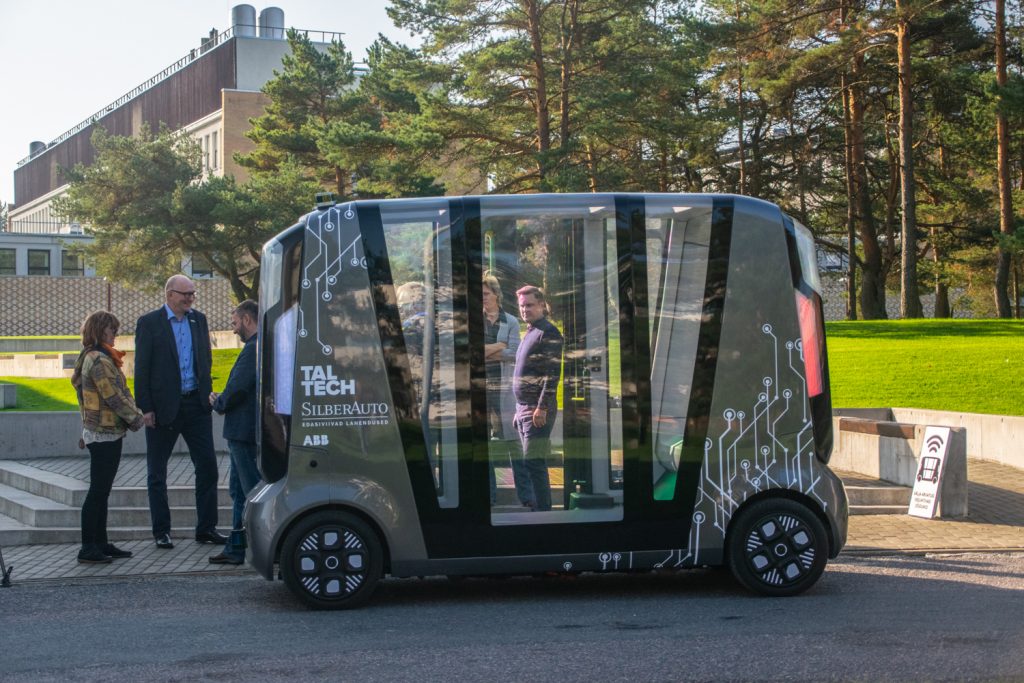
Alustame bussi välimusest, mille disainis ja projekteeris Silberauto disainer Sven Sellik. Iseauto on disainitud sümmeetriliseks, mille tõttu pole väliselt kohe aru saada, kumb on bussi esi- ja kumb tagaosa. Põhivärviks on tumehall. Lisaks on kasutatud musta ja valget värvi. Kõrgus on 2,4 m, pikkus 3,5 m ja laius 1,5 m ning kaalub 1,1 tonni. Alljärgnevad pildid annavad kõige parema ülevaate sellest, milline buss välja näeb.


Järgmisena vaatleme kuhu ja kuidas on bussi paigutatud erinevad sensorid. Esiteks lidarid, sest nende olulisust bussil on raske ületähtsustada. Kasutame Volodyne 3D lidareid, mis tekitavad 360 kraadi enda ümber olevatest objektidest 3D pildi. Nende abil on võimalik teostada lokaalset positsioneerimist ja objektide tuvastamist. Kui esialgu planeeriti paigutada üks lidar bussi katusele ette ja teine taha, siis arenduse käigus jõuti tulemusteni, kui paigutada kaks lidarit katuse esinurkadesse väikese nurga alla (nurgaga maapinna suunas) ning lisaks üks lidar veel ka bussi ette paarikümne sentimeetri kõrgusele maapinnast.


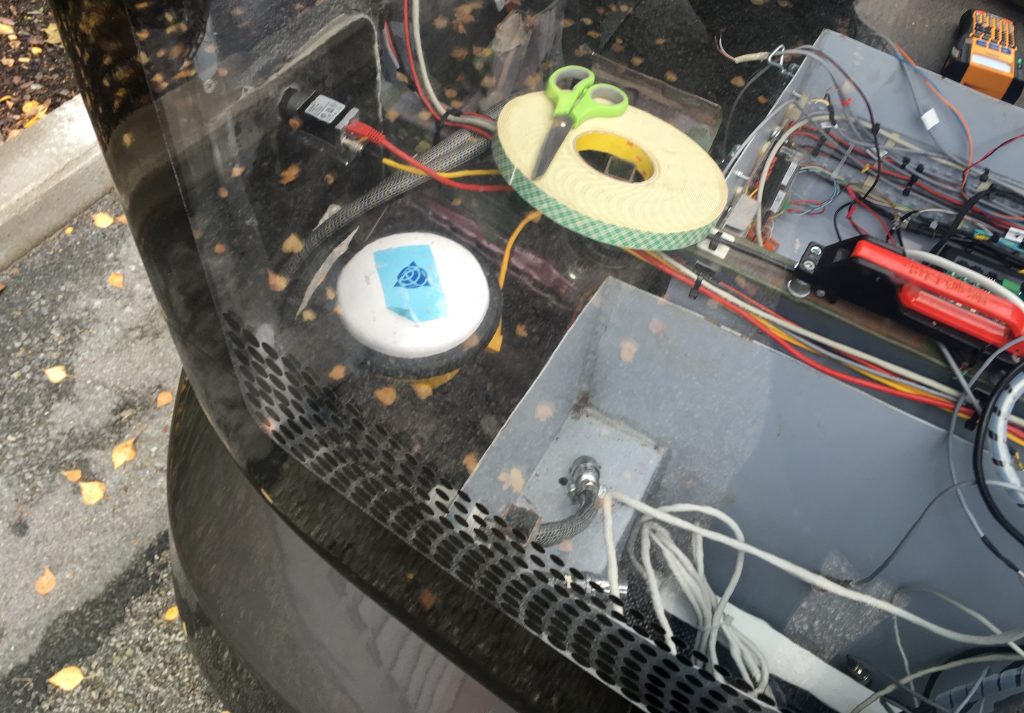
Lisaks lokaalsele positsioneerimisele suudab buss ennast positsioneerida ka globaalselt. Selleks on bussile paigutatud RTK-GNSS (Real Time Kinematic Global Navigation Satellite System), mille täpsus jääb paari sentimeetri juurde. Tema peamised komponendid on GPS moodul ja kaks antenni, millest üks on paigutatud bussi ette ja teine tahaotsa. Kahe antenni kasutamine annab võimaluse väga kiirelt liikumissuund paika saada. Moodul ise sai esialgu paigutatud auto tagaossa mootori kohale, kuid kuna Iseautol kasutataval mudelil on küljes ka inertsiaalandur, siis tuleb see ümber paigutada, sest mootoris liikuv kõrge vool tekitab magnetvälja, mille tulemusena inertsiaalanduris paiknev magnetomeeter väljastab valesid tulemusi. Inertiaalandur sisaldab endas kolme sensorit – kiirendusandur, güroskoop ja magnetomeeter ehk kompass, mis koostöös suudavad väljastada bussi liikumistrajektoori. Alloleval pildil on näha bussi eesotsas paiknev antenn.
Järgmised olulised sensorid on kaamerad, mida on hetkel bussis kokku 5. Kaks kaamerat vaatavad bussi ette – üks üleval ja teine all, üks bussi taha (all) ja kaks tükki külgedele (paikevad bussi esiosas külgedel). Kaamerate abil on võimalik hõlpsasti teostada objektide tuvastamist. Hetkel tuvastab Iseauto vaid inimesi ja autosid, kuid lähiajal lisandub kindlasti ka näiteks liiklusmärkide või loomade tuvastamine.
Iseautole paigutatud ka 8 ultraheliandurit, millede ülesanne on tuvastada objekte bussi lähiümbruses kuni mõne meetri kauguseni. Neli sensorit paigutati bussi ette ja neli taha.

Sellega oleme Iseauto sensoorika osa ära kirjeldanud. Edasi vaatame seda, milleks ta võimeline on.
Tänasel päeval on Iseauto peamiseks võimekuseks see, et ta suudab eelkaardistatud rajal etteantud trajektoori etteantud kiirusel järgida. Kaamerate abil suudab Iseauto ka kindlaks teha ümbruskonnas liikuvad inimesed ja sõidukid. Maksimaalne lubatud sõidukiirus bussil on 20 km/h. Tänase päeva seisuga on tema peamisteks puudujääkidest võimekus lidari abiga objekte sõidutrajektooril tuvastada ning seetõttu puudub tal ka võimekus vastavalt vajadusel nendest objektidest ümber põigata. Siiski on need funktsionaalsused arenduses. Turvalisuse tagamiseks peab bussis sõidu ajal olema vähemalt üks operaator, kes saaks bussi vajadusel mõne eelmises osas kirjeldatud hädapiduri nupuga seisma pidurdada.

Ja kõige lõpuks – mis saab Iseautost edasi? 14. novembril 2018. aastal, kaks kuud pärast esimest demo sõlmisid TalTechi rektor Jaak Aaviksoo ja Silberauto AS juhatuse esimees Väino Kaldoja lepingu, mis annab aluse Iseauto jätkuvaks arenguks ning uue Iseauto loomiseks. Eesmärk on luua Iseauto2, mis väliselt näeks välja samasugune, kuid mis oleks nii mehhaaniliselt kui ka tehnoloogiliselt oluliselt optimeeritud ning mis oleks mõeldud liiklema ka reaalsetel linnatänavatel. Tema valmimisaeg saab olema 2019. aasta suvi. Esimene Iseauto jääb aga TalTechi tudengitele arendus- ja õppeplatvormiks ning on ühtlasi ka Iseauto2-le paigaldatava tehisintellekti ja sensoorika testplatvormiks.
Blogi valmimist toetavad Haridus- ja Teadusministeerium ning SA Eesti Teadusagentuur.