
Sissejuhatus
Järgnevas kahes blogipostituses näitame, kuidas on võimalik ise nutikodu prototüüpi ehitada. Eesmärgiks on valmis saada lihtne automaatikalahendus, kus liikumise peale läheks automaatselt leed põlema ning lisaks proovime sama valgustust juhtida nutitelefoni kaudu. Esimeses osas tutvustame, mida selleks vaja läheb, kuidas moodulid töötavad ja milline võiks olla ühendusmetoodika ning teises osas keskendume rohkem tarkvarale.
Töövahendid
- Raspberry Pi 3B+*
- LED ehk valgusdiood
- 220 Ω takisti
- PIR mini HC-SR505 liikumissensor
- Makettplaadi juhtmed (jumper wires)
* Tegelikult sobib ükskõik milline versioon. Konkreetse ettevõtmise jaoks võivad erinevuseks olla GPIO viikude asukohad ja numbrid, mistõttu tuleks ühendamisel üle kontrollida vastavad tähistused paigutusplaanist (pin layout).
Vajalikud komponendid võib leida hästi varustatud elektroonikapoodidest nagu Oomipood, Yeint, Serigo või Ebay.
Juhtkontroller
Igasugune automaatjuhtimine vajab teatavat kontrollermoodulit ehk teisisõnu aju, mis loeb ja väljastab signaale sõltuvalt määratud juhtimisloogikale. Antud blogipostituse jaoks valisime selleks Raspberry Pi, mille küljes olevad GPIO (universaalpordid) viigud võimaldavad tarkvaraliselt pingesignaali lugeda (aru saada, kas viik on pingestatud välisseadme/loogika poolt) ja kirjutada (pingestada viiku). Lisaks sellele on seadet võimalik lihtsasti ühendada internetti, mis annab tugeva eelise andmete edastamiseks.
LED ehk valgusdiood
Otsetõlgituna tähendab LED valgust eraldavat dioodi. Tegemist on seadisega, kus laengute liikumisel ühelt pooljuhilt (katoodilt) teisele (anoodile) eraldub valgus. Seetõttu on leedi paigutamisel skeemi olulisel kohal selle suunaline paigutus. Õnneks on probleemi lihtsutamiseks välja mõeldud tähistused.
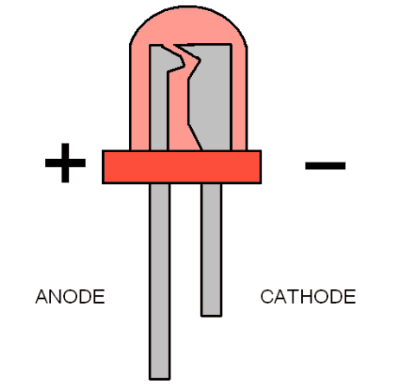
Nagu ka jooniselt näha on alati üks viik pikem (+ klemm) kui teine (- klemm). See tähendab, leed tuleb alati ühendada skeemile pikem “jalg” pingeallika poolel. Lisaks sellele tuleb tähelepanu pöörata pinge suurusele. Kui antakse liiga tugev pinge, võib valgusti (väga) kiiresti läbi põleda. Sobiv pinge on määratud valguse värvusega ning üldjuhul jääb vahemikku 1.8 – 3.3 V. Täpne väärtus on üldjuhul kirjas pakendil või tehnilisel kirjelduses.
Kui selgub, et pingeallikast tulev pinge on liiga suur valgusdioodi jaoks, tuleb skeemile lisada jadamisi takisti, mille eesmärgiks on osa tulevast pingest enda peale võtta. Sobiva takisti valimiseks võib kasutada erinevaid internetis olevaid kalkulaatoreid, kuid suure tõenäosusega oskab ilmselt aidata ka elektroonikakomponentide müüja või mõni tuttav asjatundja.
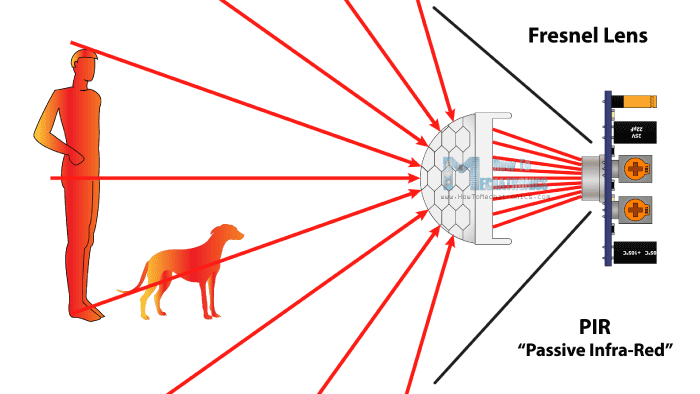
PIR (passive infrared detector) ehk liikumisandur
Kõik objektid, mille temperatuur on suurem, kui absoluutne null (-273.15 °C) eraldavad mingil määral soojusenergiat. Seda energiat on võimalik tunnetada infrapuna lainesagedise läheduses. Meie poolt pakutav liikumisandur töötab passiivses (sellest ka “P” täht) režiimis, mis tähendab, et liikumise tuvastamiseks sensor ainult “jälgib” keskkonda. Täpsemalt dekteeritakse nö soojusenergia muutumist, mis toimub keha (nt inimese või koera) liikumisel konkreetses alas.
Enne sensori lisamist automaatikasüsteemi, tuleb alati uurida, kuidas sellelt informatsiooni lugeda. Antud projektis kasutusel olev sensor pingestab liikumise tuvastamisel keskmise väljundviigu 3.3 V peale. Seega saame lihtsasti Raspberry Pi GPIO viigu lugemisoperatsiooniga teada, kas toimus liikumine (sisend on pingestatud) või mitte (sisend ei ole pingestatud).
Siinkohal tahaksime tähelepanu juhtida asjaolule, et konkreetne Raspberry Pi võimaldab lugeda 3.3 V pingesignaali. Kui see nii poleks, peaksime hakkama kas sensori väljundsignaali tõstma (võimendama) või siis langetama sõltuvalt juba seda töötleva seadme omadustest ja võimalustest.
Ühendamine
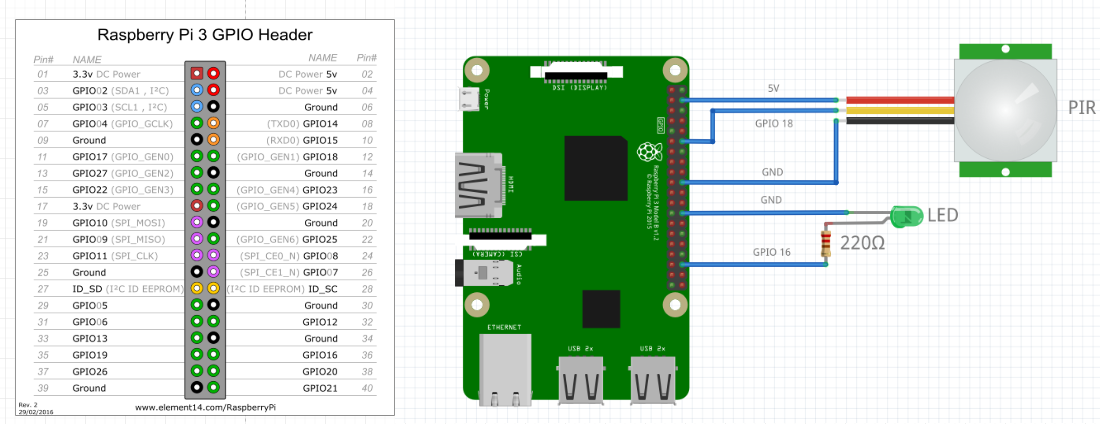
Raspberry Pi küljes asuvat konstantse 5 V väljundviigu ühendame liikumisanduri (PIR) toitmiseks ning universaalporte (GPIO) kasutame valgusdioodi (LED) juhtimiseks ja liikumisest märku andva signaali lugemiseks. Vajaliku info viikude omaduste ja tähistuste kohta saab leida spetsiaalsest paigutusplaanist (joonise vasakpoolne osa). Komponentide vaheliste kontaktide loomiseks on mugav kasutatada spetsiaalseid makettplaadijuhtmeid, mis skeemil on tähistatud sinisega. Vajadusel võib kindluse tagamiseks kasutada jootmistehnikat.
Blogi valmimist toetavad Haridus- ja Teadusministeerium ning SA Eesti Teadusagentuur.