TalTech Iseauto valmib TalTech infotehnoloogia-ja inseneriteaduskonna tudengite ning Silberauto AS koostööna. Projekti ühe partnerina on kaasatud ka ABB.
Kui eelnevas kahes postituses keskendusime Mitsubishi i-Mievi juhtloogikaga tutvumisele ning juhtimisalgoritmide väljatöötamisele testautona kasutatava Mitsubishi i-Mievile, siis seekord teeme tutvust sellega, kuidas valmis TalTechi Iseauto buss.
Esimeses postituses rääkisime sellest, et bussi ehitamiseks on vaja kõigepealt olemasoleva Mitsubishi i-Mievi kere lammutada. Seejärel tuleb valmistada bussi jaoks vajalikud keredetailid ning kõige lõpuks need ka paigaldada. Kõige selles juures tuleb arvesse võtta seda, et valmivasse bussi peab saama paigutada vajamineva riistvara nii, et sellele saaks arendustöö käigus pidevalt ligi. Samuti on oluline, et kogu riistvara saaks reisija silme eest ära peita. Eelnevat kokku võttes – disainida praktiline, kasutajasõbralik ning silmailu pakkuv buss, on inseneridele ja disaineritele alati paras väljakutse.
Iseauto disaini ja pealisehituse valmistamise eest hoolitses Silberauto AS, kes nagu me juba varasemalt teame, on TalTechile antud projektis suurim partner. Järgnevatel piltidel on näha, kuidas käis vormide valmistamine, millised need välja nägid ning kuidas lõplik kere auto alusvankrile paigaldati.



Riistvara paigaldamiseks bussile tehti kaks suuremat metallkasti, mis paigutati auto etteotsa. Üks kast on personaalarvuti ja teine vajaminevate kontrollerite jm seadmete jaoks.
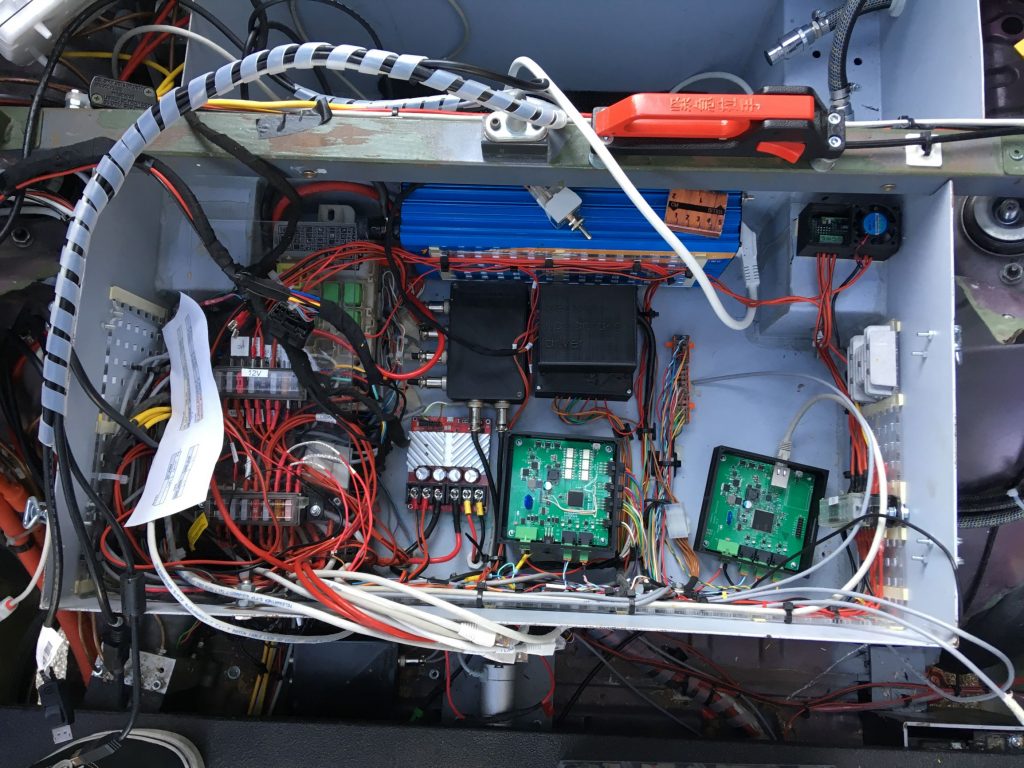
Bussi juhtimine käib suures osas sarnaselt nagu testauto oma, kuid omab siiski paari olulist erinevust. Kõige märkimisväärsem neist on erinevus pidurite juhtimisel. Kokku on bussil kolm erinevat võimalust pidurdamiseks.
Kui testautol kasutame oma algoritmide testimiseks piduritena elektroonilist käsipidurit, siis bussil pole antud lahendus piisavalt vastupidav ning pidurdusjõustki jääks puudu. Seega otsustasime kasutada pidurdamisel auto enda pidureid. Selleks oli meil aga vaja lisada Iseautole elektrooniline piduripump. Piduripumbaga saame piduritele rõhku pumbata, kuid sellest üksi on vähe. Esimeses postituses mainisime pidurite kohta, et lisaks piduripumbale on oluline ka solenoidide juhtimine. Tegime kindlaks, et meil piisab vaid kahe solenoidi kontrollimisest, et pidureid kasutada ning loogika nende kasutamisel on lihtne – selleks, et pumba tööl tekiks pidurisüsteemi rõhk, tuleb solenoidid sisse lülitada. Kui need välja lülitada, siis pidurid vabastatakse. Et me teaks, palju pidurid parasjagu peal on, lisasime pidurisüsteemile rõhuanduri. Rõhuandurist saame analoog-digitaal konverteri abiga kätte rõhu hetkenäidu ja mida suurem rõhk, seda tugevamini pidurid peal on.
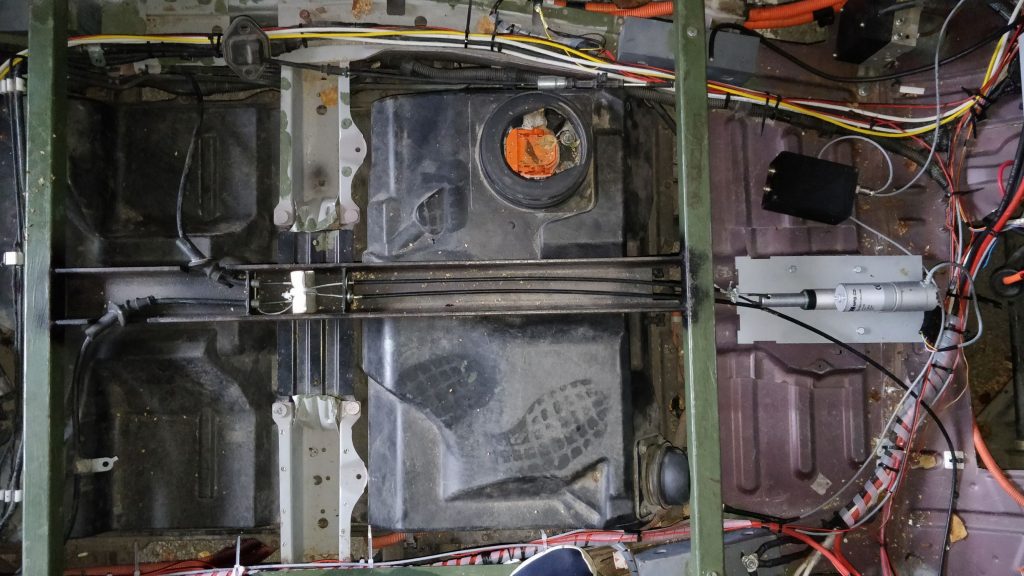
Lisaks tavalistele piduritele on autost erinev ka käsipidurisüsteem. Nimelt on bussis kaks käsipidurit – üks manuaalne ja üks elektrooniline. Elektroonilise käsipiduri juhtimine käib lineaaraktuaatoriga (loe lähemalt siit), mis on paigaldatud auto põhja peale. Manuaalse käsipiduri kang on paigutatud auto esiotsa riistvara jaoks mõeldud kastide vahele. Mõlemad käsipidurid on ühendatud i-Mievi originaalkäsipiduri trossiga, mida piisavalt tõmmates pidurid rakenduvad. Rooli, käigukasti ja gaasipedaali juhtimine käib täpselt samamoodi nagu testautol.
Sisuliselt sai kirjeldatud kolme erinevat pidurit, mis Iseautol olemas on. Miks meil neid nii palju vaja on? Üks kõige olulisemaid aspekte Iseauto juures on turvalisus ning mida rohkem viise on meil auto seiskamiseks, seda parem. Nagu juba kirjeldatud, siis piduripedaali ega rooli keeramise võimalust käsitsi meil ei ole. Seetõttu tuleb auto seisma saamine ohu korral teostada enamasti elektrooniliste lahendustega. Ainukene erand on meil manuaalne käsipidur, mida saab käsitsi peale tõmmata.
Kui mehaanilise piduri peale tõmbamine välja jätta, siis bussis on kokku kolm nuppu elektrooniliste pidurite rakendamiseks.
Esimene ja siiamaani kõige rohkem kasutatud hädapiduri nupp on meil ühendatud otse drive kontrolleri külge ja seda vajutades lõpetab drive kontroller rakendab pidurid maksimaalse jõuga. Selle nupu eelisteks on see, et pidurdusjõud on suur ning rakendusaeg lühike. Samuti see, et kui nupp vabastada, saab koheselt sõitu jätkata. Puuduseks on aga see, et kui drive kontroller millegipärast ei tööta, ei saa läbi selle nupu ka pidureid vajutada.
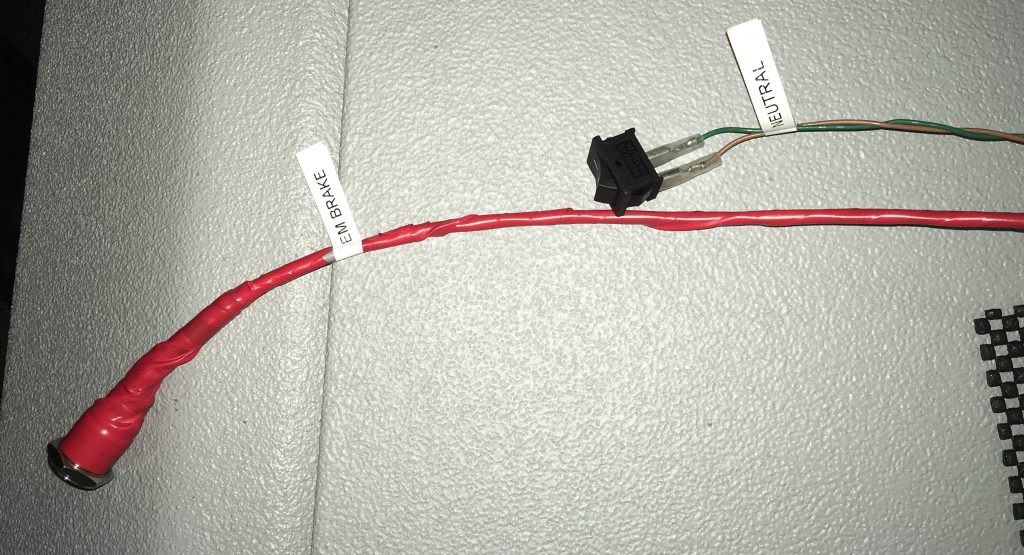
Järgmine võimalus autot peatada on suure punase hädaabi nupu abil, mille oleme paigutanud auto esiotsa. Kui seda nuppu vajutada, siis lülitub autos süüde välja ning elektrooniline käsipidur rakendub. Eelis on see, et kuna auto mootor lülitatakse välja, siis auto jätkab sõitu vabakäigul, st mootor sõitmiseks lisajõudu ei rakenda. Puudus on aga see, et elektroonilise käsipiduri rakendamise aeg on mitu sekundit ja seetõttu pidurdusmaa pikem kui esimese lahenduse puhul. Küll aga kiirendab natukene pidurdamist see, kui pärast selle nupu vajutamist rakendada ka lähedal asuvat manuaalset käsipiduri kangi.
Kõige viimase lahendusena on meil veel autos lüliti, mida lülitades auto peaaku mootorist lahti ühendatakse. Selle lahenduse puhul võime kindlad olla, et auto lülitub nö vabakäigule ja mootorist lisajõudu edasiliikumisele ei rakendu. Puudusteks on aga see, et ükski pidur otseselt ei rakendu ning pärast selle nupu vajutamist on vaja bussi elektrooniliselt kontrollüksuselt diagnostikaseadmega veakoode kustutada. Seniste testimiste käigus ei ole antud nuppu olnud põhjust kasutada.

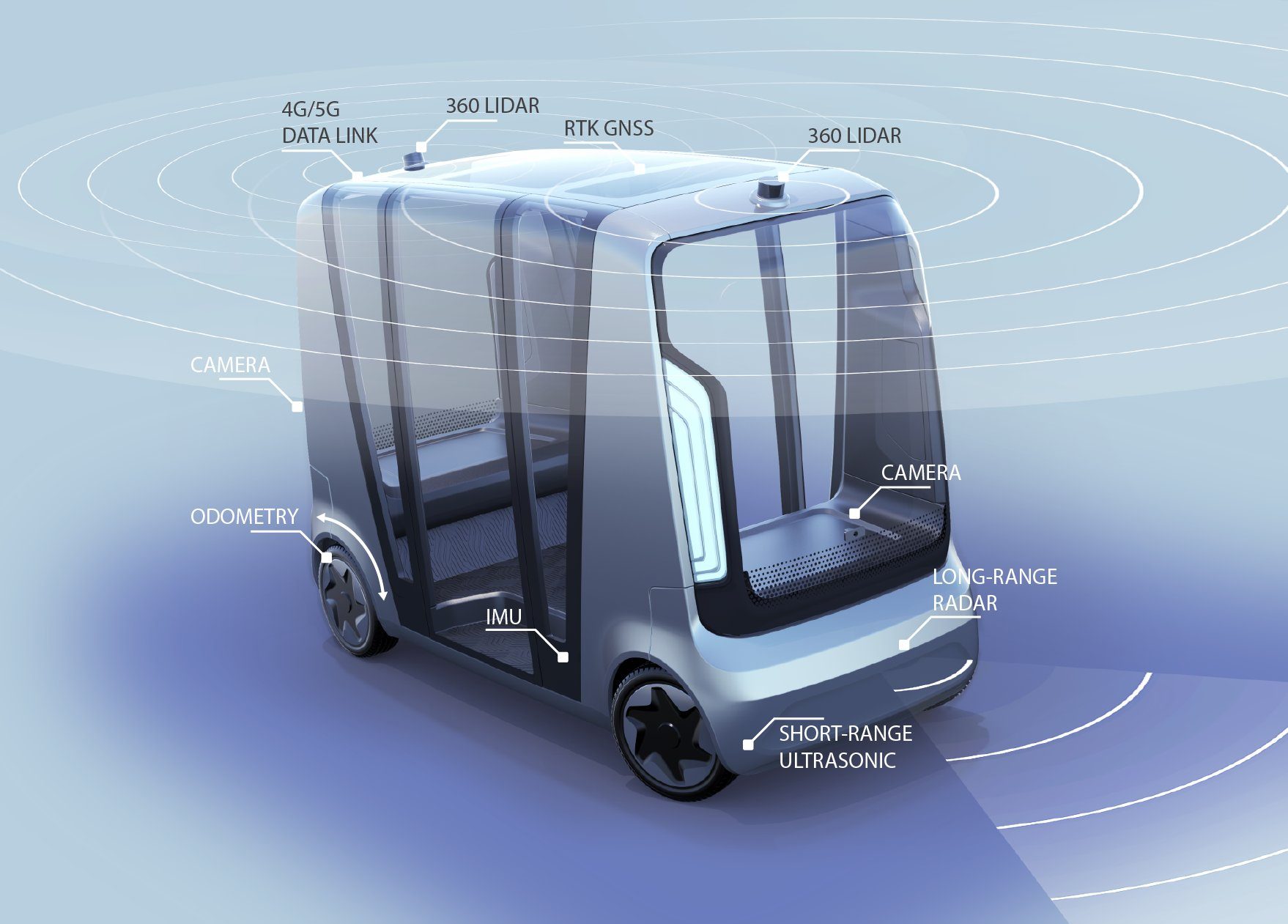
Erinevalt testautost on bussil veel mõned täiendused. Esimeseks neist on tuled, mis on LED ribadena paigutatud bussi esi- ja tagaossa. Igale tulele on lisatud kontroller, mis vastavalt talle CAN(controller area network)-siini pidi edastatud soovile tulede värvi muudab. Teisena, on vaja kontrollida ka bussi ust ja ka selle jaoks on lisatud kontroller, mis reageerib samuti CAN-siinilt saadud sõnumile. Kolmandaks – bussile on lisatud erinevalt testautost 8 ultraheli sensorit – neli paiknevad ees ja neli taga. Nendelt info hankimiseks ja edastamiseks on nii ees kui ka taga eraldi kontroller, mis kogub sensoritelt info ning väljastab selle CAN-siinile nii, et objekti kaugused igast ultrahelisensorist on märgitud detsimeetrites.
Sellega on kõik olulised bussile said paigutatud riistvara komponendid üle käidud. Järgmisel korral vaatame seda, milline näeb buss lõplikult välja, kuidas ja millised sensorid bussile paigutati, milleks Iseauto võimeline on ning milline on tema tulevik.
Blogi valmimist toetavad Haridus- ja Teadusministeerium ning SA Eesti Teadusagentuur.