
Summary
- Funding source(s): Tallink AS
- Total project cost: 100,000 EUR
- Start and end dates: 01.2019 – 12.2020
- Project manager: Mairo Leier
Goal
The main goal of the project is to extend the smart port solutions for ship car deck so that it could either decrease the load for ship crew members and speed up the cargo loading process. There are four main group of problems:
- Automatic traffic flow handling
- Cargo area efficient usage
- Passenger guidance to the right car deck and location of their vehicle
- Automatic ship docking solution
During the project following tasks were solved:
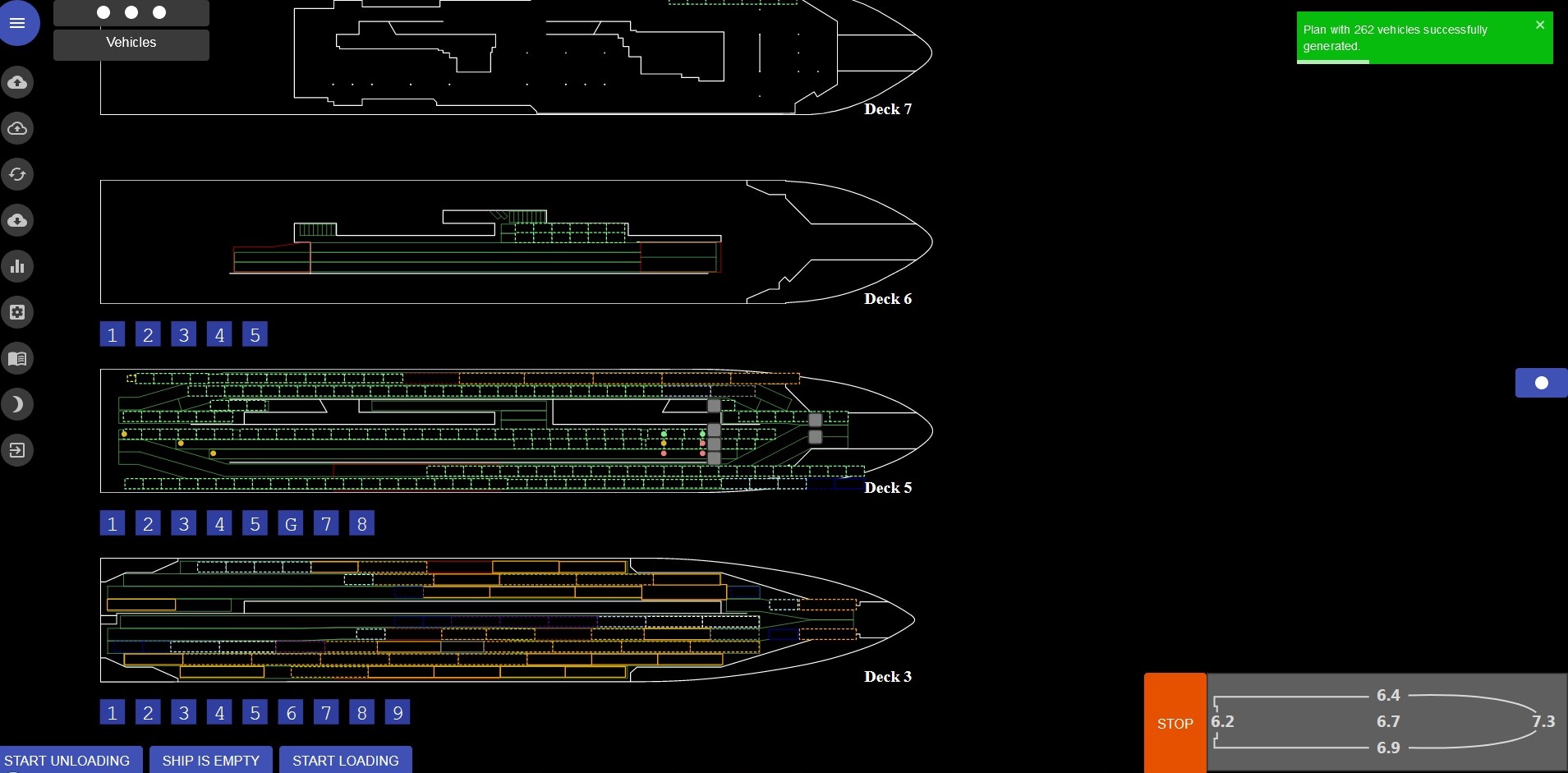
- Server-side solution that collect all data from the ship and smart port, and provides real-time cargo-plan with stability calculations available for all crew members
- Electronic vehicle guidance to the right car deck and up to the planned vehicle location on the deck
- Real-time cargo-plan algorithm that takes into account planned cargo-plan and real situation
- Car deck sensorics for vehicle type and location detection
- Integration with the smart port traffic lights
- User interface for all ship crew members to manage and view information about the current status and take over the system for manual usage
Implementation of research outcomes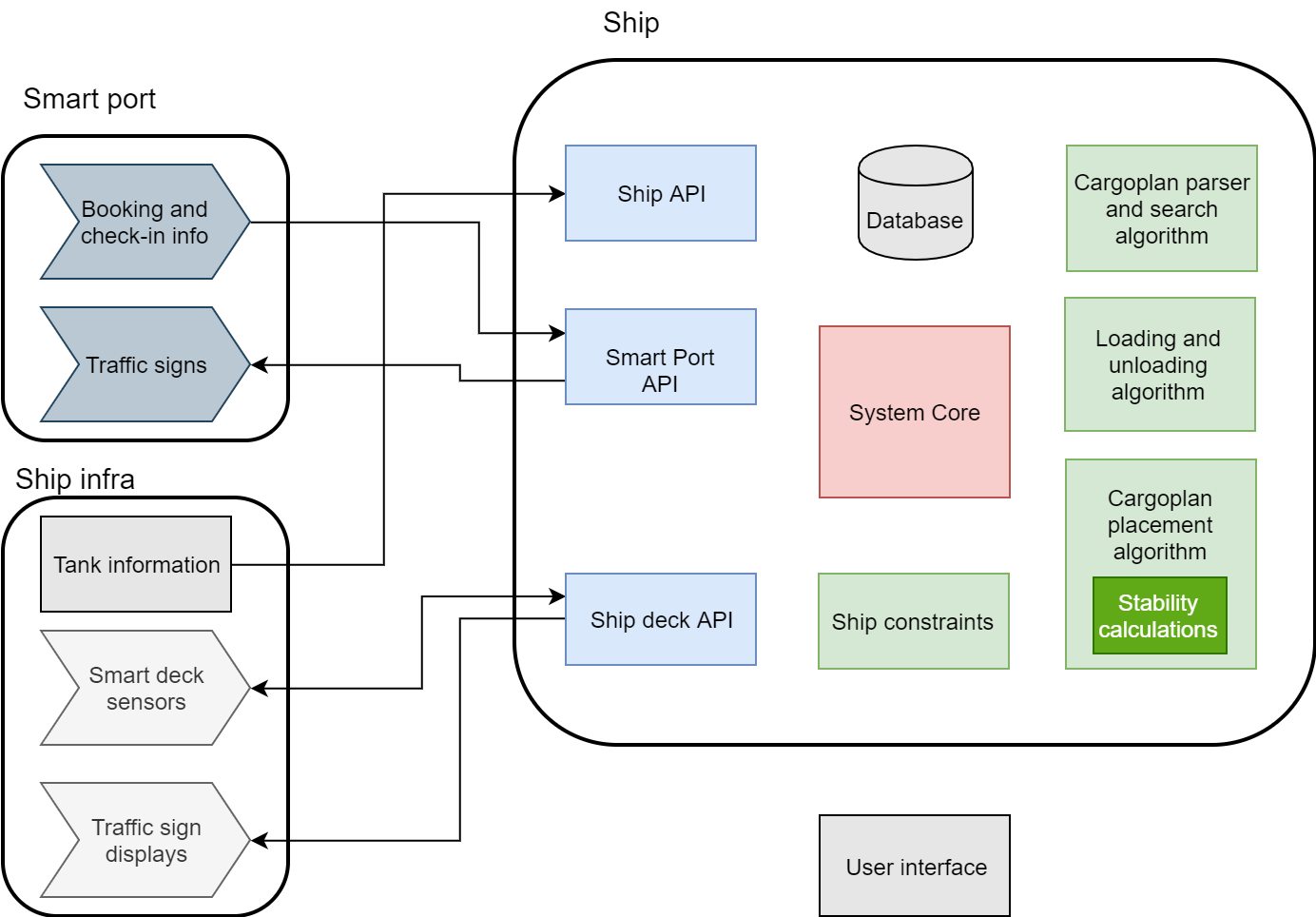
Developed system architecture has developed so that all critical processing is perfomed centrally. It contains multiple sub-modules that interact independently to avoid data loss and system outage if some component is out of service. For the most critical components there are also internal fall-back scenarios developed. System interacts with crew members in real-time by making corrections in cargoplan and loading or unloading process depending on the information gathered from smart port or ship sensors. There are several time-critical algorithms:
- Cargoplan generation algorithm analyzes previous cargoplans, booking and check-in information, ship tanks information, current departure specific conditions and ship specific constraints. As there are huge amount of variables that change till the end of the loading, algorithm must adapt fast and provide up to date information to other parts of system for real-time guidance.
- Cargo loading and unloading algorithm takes care that cargo loading can be performed in the fastest way avoiding any kind of stall and increasing the loading throughput as much as possible. At the same time it is necessary to take into account current ship’s stability status not to break ramp. Any kind of deviation or miscalculation may affect ship stability up to the fatal consequences. At the same time it is necessary to take into account VIP passengers, special and over-sized cargo and several unexpected conditions that may appear during the loading process.
- Stability calculation algorithms that checks in real-time whether to change cargo (un)loading process.
To keep a whole solution running smoothly it is needed to integrate ship infra with smart port and allow access to all crew members with different access levels. That means developing different APIs for other systems.
Vehicle detection solution
Another important part of the solution is development of vehicle detection system for all car decks. It is a matrix of sensors that covers all car decks. There are two types of sensors used that extend each other. Conventional sensors detect approaching car and its height, and sensor with extended functionality detects with machine-learning all surrounding vehicles and in combination with other sensors place them to the right position on the car deck. Both sensors also guide passengers to the right line and destination on the car deck with special indicators. All sensors are working in a swarm and provide real-time information about the actual situation over all car decks.
Media



Press
- Vikerraadio: Nutikas. Tark autotekk Tallinki laevadel. Mairo Leier, Dan Heering, Paavo Kõplas (26.09.2019)
- Logistikauudised: Tallink ja TalTech hakkavad koos tarka laeva arendama (16.01.2019)
Student theses
Master theses
- Smart car deck sensor network development for Tallink Megastar, Jürgen Soom, 2020
- Simulation environment for Smart Car Deck project, Kaspar Lippmaa, 2020